") 六足仿生機器人地形自適應步態(tài)規(guī)劃研究
六足仿生機器人地形自適應步態(tài)規(guī)劃研究

第1章 緒論
1.1 研究背景與意義
1.2 國內外研究現狀
1.2.1 多足機器人步態(tài)規(guī)劃
1.2.2 地形適應技術
1.3 關鍵技術挑戰(zhàn)
1.4 本文主要貢獻
第2章 機器人系統建模
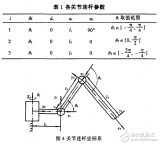
2.1 機械結構參數
% 機器人參數配置
robotParams = struct(...
'bodyLength', 0.5, ... % 機身長度(m)
'legSegments', [0.1, 0.15, 0.2],... % 三段式腿部長度
'DOF_perLeg', 3,... % 單腿自由度
'maxStride', 0.3,... % 最大步幅
'servoRange', [-pi/2, pi/2]); % 舵機運動范圍
2.2 運動學模型
2.2.1 DH參數建模
2.2.2 正逆運動學推導
第3章 地形感知與建模
3.1 多傳感器數據融合
classdef TerrainSensor < handle
properties
depthData % 深度傳感器矩陣
imuData % 姿態(tài)傳感器數據
end
methods
function obj = processTerrain(obj, rawDepth)
% 實施高斯濾波和法向量計算
obj.depthData = imgaussfilt3(rawDepth);
end
end
end
3.2 三維地形特征提取
3.3 足端可接觸性分析
第4章 自適應步態(tài)生成算法
4.1 基礎步態(tài)庫構建
4.1.1 三角步態(tài)生成
function [gaitSequence] = generateTripodGait(cycleTime, stepHeight)
% 生成相位調節(jié)參數
phaseOffset = [0, 0.5, 0, 0.5, 0, 0.5];
% 實現貝塞爾曲線足端軌跡
t = linspace(0, cycleTime, 100);
for legNum = 1:6
trajectoryX = bezierCurve(t, [0, stepHeight/2, stepHeight, 0]);
gaitSequence(legNum).traj = [trajectoryX;...];
end
end
4.2 步態(tài)參數動態(tài)調整策略
4.3 基于地形特征的在線優(yōu)化
4.4 穩(wěn)定性判據的集成
第5章 動力學仿真與實驗
% 主仿真循環(huán)
for t = 0:dt:simTime
currentTerrain = terrainMap.getHeightmap(robotPos);
gaitParams = adaptGait(currentTerrain, robotState);
jointAngles = inverseKinematics(gaitParams);
% 動態(tài)模型解算
[q,dq] = ode45(@(t,y) dynamicsModel(t,y,jointAngles), [0 dt], stateVec);
updateVisualization();
end
5.2 典型地形測試案例
5.2.1 斜坡攀爬仿真
5.2.2 非結構化地形測試
5.3 性能評估指標體系
第6章 驅動代碼設計與實現
6.1 系統架構設計
![嵌入式驅動架構圖]
6.2 核心模塊實現
classdef LegController < matlab.System
properties(Access = private)
currentPose % 當前關節(jié)角度
targetPose % 目標關節(jié)角度
end
methods(Access = protected)
function stepImpl(obj, terrainData)
% 實時逆解計算
obj.targetPose = computeIK(terrainData);
generatePWM(obj); % 生成舵機控制信號
end
end
end
6.3 代碼優(yōu)化策略
6.4 實測驗證分析
驅動代碼概述 :
- 硬件抽象層(HAL)
function sendJointCommands(jointAngles)
% STM32通信協議實現
persistent s;
if isempty(s)
s = serialport("COM3", 115200);
end
dataPacket = typecast(single(jointAngles), 'uint8');
write(s, dataPacket, 'uint8');
end
- 運動控制內核
function [trajectory] = adaptiveGaitPlanner(terrainMap, currentPose)
% 混合整數規(guī)劃求解最優(yōu)步態(tài)參數
options = optimoptions('intlinprog','Display','final');
[optParams,~] = intlinprog(costFunc, constrFunc, terrainMap, [], options);
trajectory = generateMotionPrimitive(optParams);
end
- 地形處理模塊
function footHoldMap = findOptimalContact(terrainData)
% 卷積神經網絡足點檢測
net = load('terrainCNN.mat');
footHoldMap = predict(net, terrainData);
footHoldMap = nonMaximumSuppression(footHoldMap);
end
后續(xù)擴展建議:
4. 可以添加ROS集成模塊
5. 強化學習訓練框架
6. 動態(tài)穩(wěn)定性判據優(yōu)化
7. 能源效率優(yōu)化算法
源碼&文檔鏈接
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29730瀏覽量
212829 -
仿生機器人
+關注
關注
1文章
75瀏覽量
15606
發(fā)布評論請先 登錄
相關推薦
熱點推薦
《電子發(fā)燒友電子設計周報》聚焦硬科技領域核心價值 第2期:2025.03.3--2025.03.7
ESP32-C2芯片,深度融合LLM大模型,實現流暢自然的AI語音交互。
技術看點:
六足仿生機器人地形自適應步態(tài)
發(fā)表于 03-07 18:03
stm32紅外六足機器人
完善這個作品。主要運用的算法1、D-H參數模型2、三軸姿態(tài)解算3、六次項足跡規(guī)劃4、步態(tài)規(guī)劃5、平臺姿態(tài)解算即18軸加平面軸解算(未完成)知識點1、運動學2、
發(fā)表于 03-27 18:51
【Embedded Pi申請】六足機器人的創(chuàng)新研發(fā)
的芯片,一定會讓六足機器人完成更多的創(chuàng)新!項目描述:開發(fā)項目:六足機器人。初步方案:
發(fā)表于 11-25 15:35
什么是龍人四足機器人?
龍人四足機器人是一種仿生機器人,由Openduino控制板控制,有四條腿,每條腿兩個自由度,由兩個舵機驅動,能實現兩種步態(tài)行走。配有三個超聲波,實現大角度智能避障。標準演示程序有5個可
發(fā)表于 03-24 16:17
labview如何實現六足機器人的三足步態(tài)的編程程序
用labview如何編寫六足機器人三足步態(tài)的程序?主要的依據和原理是什么呢?求指教!
發(fā)表于 08-04 19:21
四足仿生機器人
本帖最后由 紅塵。破 于 2016-8-19 14:59 編輯
今天整理資料時發(fā)現了一年前做的四足仿生機器人,當時買了一個四足仿生機器人的骨架,畫了個板子,寫了個測試代碼,能完成
發(fā)表于 08-19 14:59
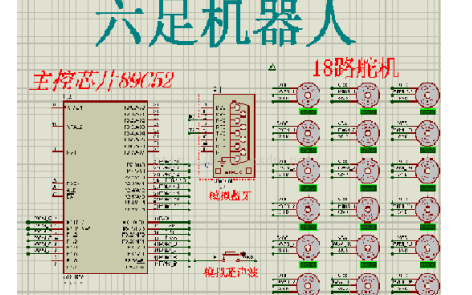
【NUCLEO-F412ZG申請】六足仿生機器人
。六足機器人的每條腿由三個關節(jié),都由舵機控制,一共有18個舵機,需要18路PWM來控制。F412有14個16位定時器,足以滿足需求,加上125DMIPS的處理速度,可以很好的對六
發(fā)表于 11-14 18:54
開源資料六足仿生機器人(原理圖+PCB+源碼等)
有很多小伙伴喜歡在沒事的時候鼓搗一些機器人什么的,現在給大家分享一個仿生機器人開源資料,喜歡的小伙伴可以看看。六足機器人系統基于
發(fā)表于 10-10 09:57
仿生機器人開源資料(原理圖+源碼+論文)
本設計主要研究的是小型仿生六足機器人控制系統的開發(fā),其采用自主設計的控制器作為硬件平臺。控制器主要有微處理器、驅動模塊、電源模塊、外圍擴展構
發(fā)表于 10-13 09:13
基于ADAMS的四足仿生機器人單腿結構設計
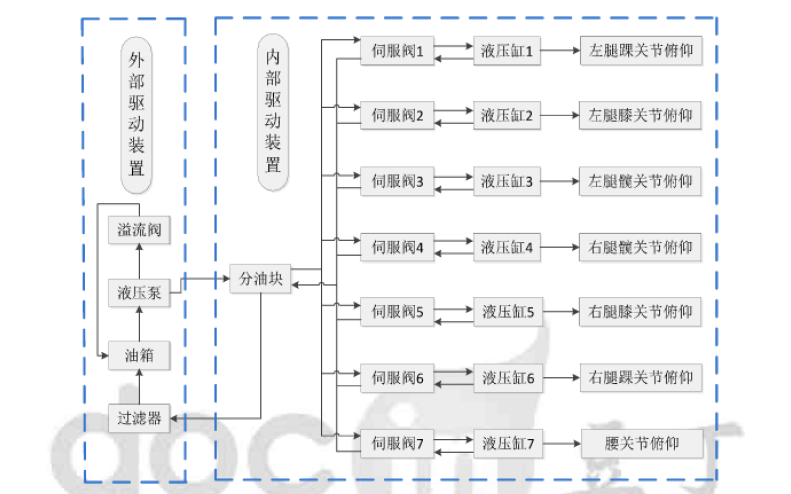
的實際運動步態(tài),規(guī)劃并設計了靜步態(tài)及對角小跑兩種步態(tài),進行了逆動力學仿真,得到關節(jié)等關鍵部位輸出數據。在仿真實驗的基礎上,設計了液壓作動器的關鍵參數及四
發(fā)表于 03-01 11:41
?3次下載
平面液壓雙足機器人步態(tài)規(guī)劃及阻抗控制研究說明
的靈活性和環(huán)境適應性,但這也是雙足機器人容易跌倒的主要原因之一。本文以液壓雙足機器人步態(tài)
發(fā)表于 01-17 14:19
?15次下載
機器人看點:越疆機器人正式發(fā)布六足仿生機器狗 智元公布機器人運動控制模型專利
給大家?guī)韮蓚€機器人的最新消息: 越疆機器人正式發(fā)布六足仿生機器狗 7月9日,深圳越疆機器人正式



 工商網監(jiān)
工商網監(jiān)
評論